
Our Rovers

ARES 1
ARES 2

ARES 3
ARES 4

ARES 5

ARES 6
ARES 7
ARES 8
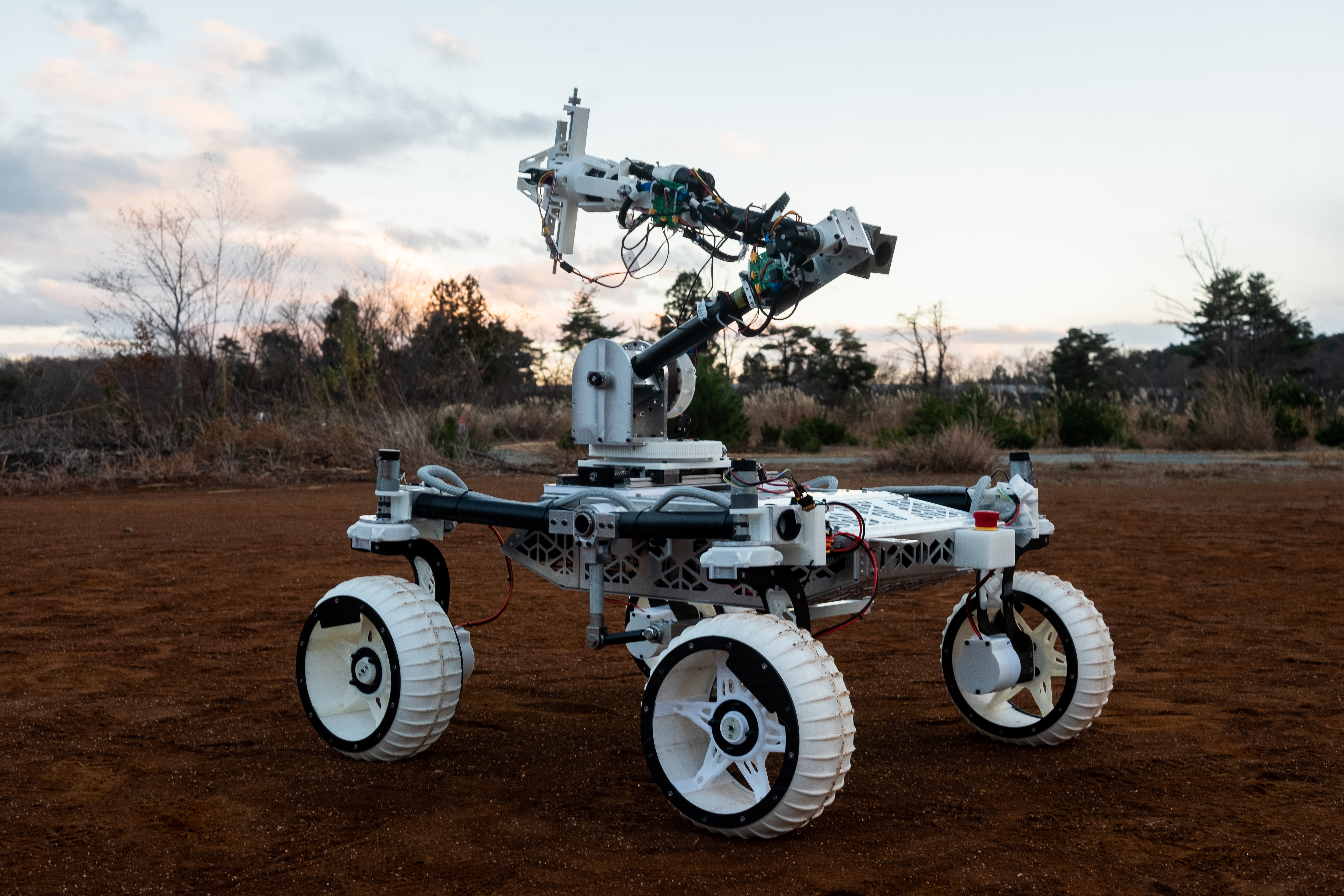
ARES 8
ARES8では、従来のアルミフレーム構造からアルミ板金構造へと筐体を刷新し、軽量化と高強度化を両立した。板金の肉抜き部分には組子細工の模様をあしらい、日本らしさを表現するとともに、拡張パーツの取り付けが可能な機能性も備えた。ステアリング機構では、荷重がかかる部分のプリントパーツを金属やCFRP製パーツに置き換えることで、さらなる軽量化と高強度を実現した。タイヤはテラメカニクスに関する文献を参考に、URC大会会場の地表に最適化した設計とし、性能向上を図った。制御システムでは、蛇行走行を可能にする機能を盛り込み、操縦者が直感的に操作できるように設計。さらに、LiDARやカメラなど複数のセンサー情報を活用して自動で経路を生成し、高度な自律走行を実現した。アームはカーボンチューブを用いて軽量化と強度向上を図り、各関節にはブラシレスモーターを採用。パワフルかつ繊細な動作が可能で、最大8.5kgの持ち上げにも対応している。配線経路を工夫することで指先先端の無限回転を実現し、さらに、従来機で問題となっていた高負荷時の関節逆転を防ぐため、ウォームギアによるセルフロック機構も搭載している。